撞击、碰撞或工具更换都有可能使整个流程偏离正轨,并可能导致停机、沉没成本和零件无法使用。生产基地可以更新机器人的运动路径以进行补偿,或选择部署贸联的 advintec TCP工具自动执行重新校准。
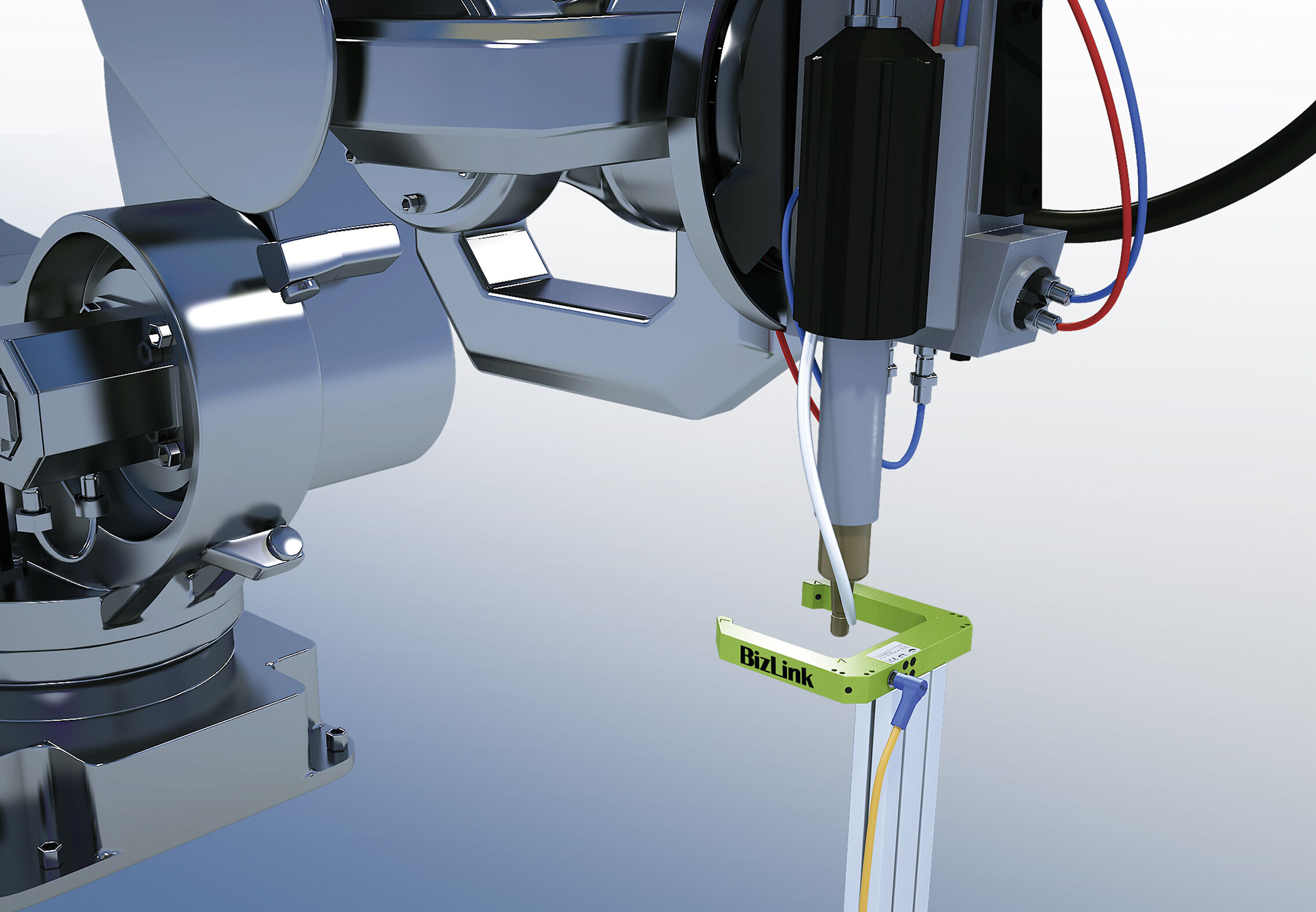
Advintec TCP 系统使用脉冲频率为 2 kHz 的双通道红外 (880 nm) 光电激光感测器,在高达六个维度(三个轴加上绕每个轴的角旋转)对工具或夹具进行电子校准,而无需触碰 EOAT(end-of-arm tool)。TCP 通过将机器人的路径与其主/参考位移进行比较实现校准目的。系统会记录机器人的路径,当流程发生变化或机器人需要重新校准时,TCP 会算出与原始参考值的偏离,并做出偏移校正。一般来说,校正 3D 偏移的周期仅需 5-7 秒,全 6D 校正仅需 10-15 秒。
例如,即使机器人在某一方向上仅移动了 5 毫米,advintec TCP 也会获取这一信息并在机器人侧进行偏移校正。
避免灾难性事件
在汽车粘合剂应用中,机器人必须将喷嘴或点胶器引导至精确位置。如果喷嘴受到碰撞,喷嘴会偏离原来的路径,但机器人仍按原路径运行。如果这个过程持续达一个小时甚至整个班次之久,导致误把胶水涂在汽车上的错误位置,大量的车辆被错误组装,这会在零件、时间和金钱方面造成巨大浪费。
借助 advintec TCP,制造商可以设置流程,允许系统在每辆车或每 10 辆车之后,执行一次快速检查,以确保机器人进行适当的校准。如果 advintec TCP 发现问题,会执行偏移校正,从而能够将损失降到仅一辆车或者不会造成任何损失。
考虑人为因素
在许多情况下,当发生撞击或碰撞事件时,操作员会进行纠正,但每个人的方法略有不同。
当喷嘴弯曲时,操作员会过来将其恢复原状或进行更换,然后确认新的工具中心点。不同人的操作存在一定差异,但我们的工具提供了更具一致性的方法,并且消除了人为因素。
贸联 TCP 工具为许多精密应用提供自动校准功能,例如处理超声切割刀片、密封剂点胶、MIG 或螺柱焊接、粘合剂涂抹的应用以及任何其他需要高精度机器人定位的应用。