advintec 6D 激光测量

采用贸联下架解决方案节省成本

挑战:
在现代生产工厂中,常常需要从箱中提取零件(车身侧板、车顶、引擎盖和类似零件),以便以全自动化的方式进行进一步处理。为此,工厂多采用工业机器人来完成。如果某零件未准确定位在预期位置,机器人将无法继续其操作循环。
解决方案:
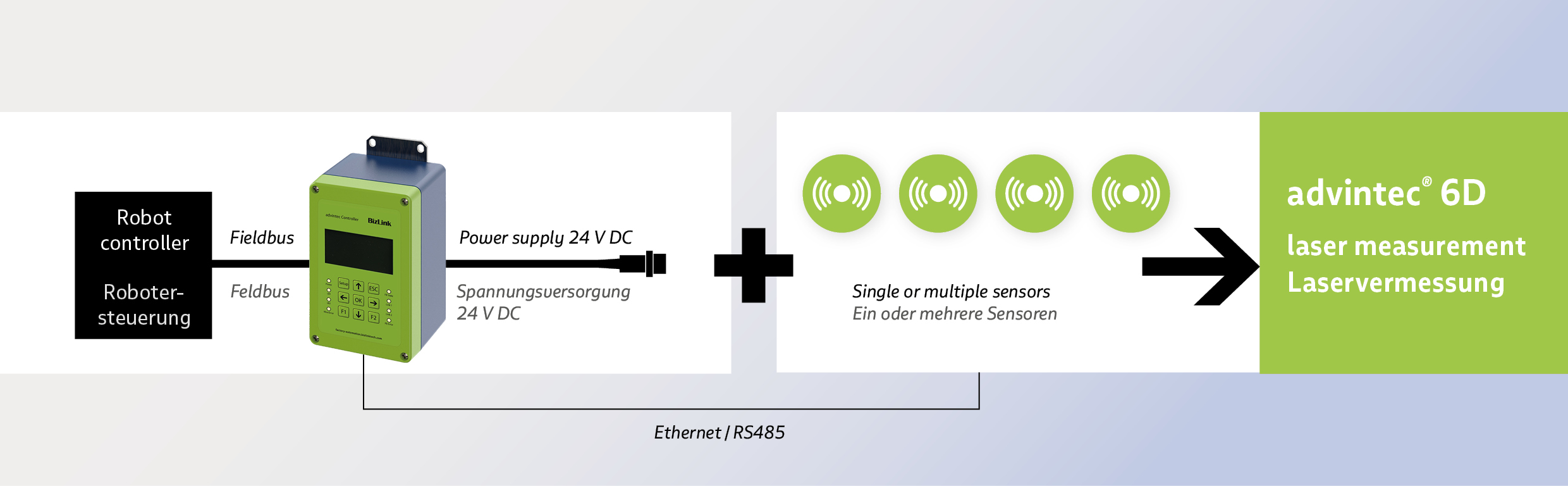
- 通过电子零件校准系统指导机器人
- 通过集成在夹具内的激光或红外传感器对零件位置进行 6D 校准(平移和旋转)——即通过现场总线与机器人控制器直接连接
- 自动在线调整拾取位置
优点:
- 比传统的机械系统节省成本
- 易于维护、易于使用
- 机器人指引不受照明条件或零件变化的影响
- 将用户和维护人员的培训成本降至最低
- 该系统体型精巧、重量轻、坚固且直接集成到夹具中,可以升级到生产线中,而无需进行耗时的修改。
直接在生产流程进行过程中自动进行校正。设置过程中自动了解正确的零件位置。
易于理解 - 缩短指导时间、易于使用。
优势一览
集成
- 针对下架应用,自动计算部件的夹持位置
- 自动调试且易于使用
- 传感器集成在夹具内
- 可扩展的模块化系统,容易适应单个下架应用
- 降低成本
- 避免部件损坏
- 确保精确夹持位置
- 缩短设置时间
- 校准控制器可计算部件位置,并通过现场总线接口将偏差传递到机器人控制器
- 很高的流程可靠性
- 无需额外的 PC
- 记录校准数据 - 自动修正抓取位置
- 故障修复容易
在生产过程中集成下架校准系统:
- 不复杂
- 将机器人编程降低到最小程度
- 快速且容易调试
- 记录校准数据:可随时进行常规数据评估
- 无需额外的 PC
供货范围:
- 安装在夹具中的传感器
- advintec 控制器
- 电缆组件:电源线、传感器电缆、总线电缆
- 传感器接口
- 用于校准的机器人程序
- 调试和培训
贸联下料解决方案的技术数据
传感器类型 | 激光类别 2 875 nm + 超声波 |
端口 | 现场总线(DeviceNet、Profibus、Profinet、Interbus 等) |
校准精度 | 0.1 mm |
防护等级 | IP65/67 |
污浊环境下工作 | 是 |
维度 | 6(3 次平移 + 3 次旋转) |
自动修正 | 是 |
应用领域 | 侧板、车板、发动机罩(引擎盖)或类似零件的下料 |
采用贸联抓手测量解决方案节省成本

挑战:
在精密加工领域精密测量抓手或抓取的部件,例如用于发动机和传动部件等动力总成应用。
解决方案:
- 借助固定式传感器对抓手/抓取部件进行 6D 激光测量
- 及时识别并在线修正抓手/零件位置的变化,从而避免碰撞并优化定位精度。
优点:
- 高精度 6D 激光测量
– 无需辅助工具或参考部件(节省大量成本) - 在正在进行的生产过程中直接自动修正机器人程序
– 无位置限制造成的故障
– 避免碰撞 - 省去手动程序修正
- 轻松集成、简单操作
- 可通过随附的机器人程序轻松完成调试
- 不易受外部光线影响
- 测量时间低于 20 秒(取决于配置和应用)
- 相比较传统机械系统,节省大量成本
- 防护等级 IP67
- 恶劣的环境
- 可使用各种不同的激光传感器 – 适合各种应用
采用贸联零件校准解决方案节省成本

挑战:
要确保零件在搬运、焊接、涂胶、铣削等精密应用中的加工位置正确。
解决方案:
- 6D 激光测量零件和夹具的位置。
- 机器人路径根据零级位置自动校正,以确保始终在正确的位置进行加工。
优点:
- 高精度 6D 激光测量
– 无需辅助工具或参考部件(节省大量成本) - 在正在进行的生产过程中直接自动修正机器人程序
– 无位置限制造成的故障
– 避免碰撞 - 省去手动程序修正
- 轻松集成、简单操作
- 可通过随附的机器人程序轻松完成调试
- 不易受外部光线影响
- 测量时间低于 20 秒(取决于配置和应用)
- 相比较传统机械系统,节省大量成本
- 防护等级 IP67
- 恶劣的环境
- 可使用各种不同的激光传感器 – 适合各种应用
